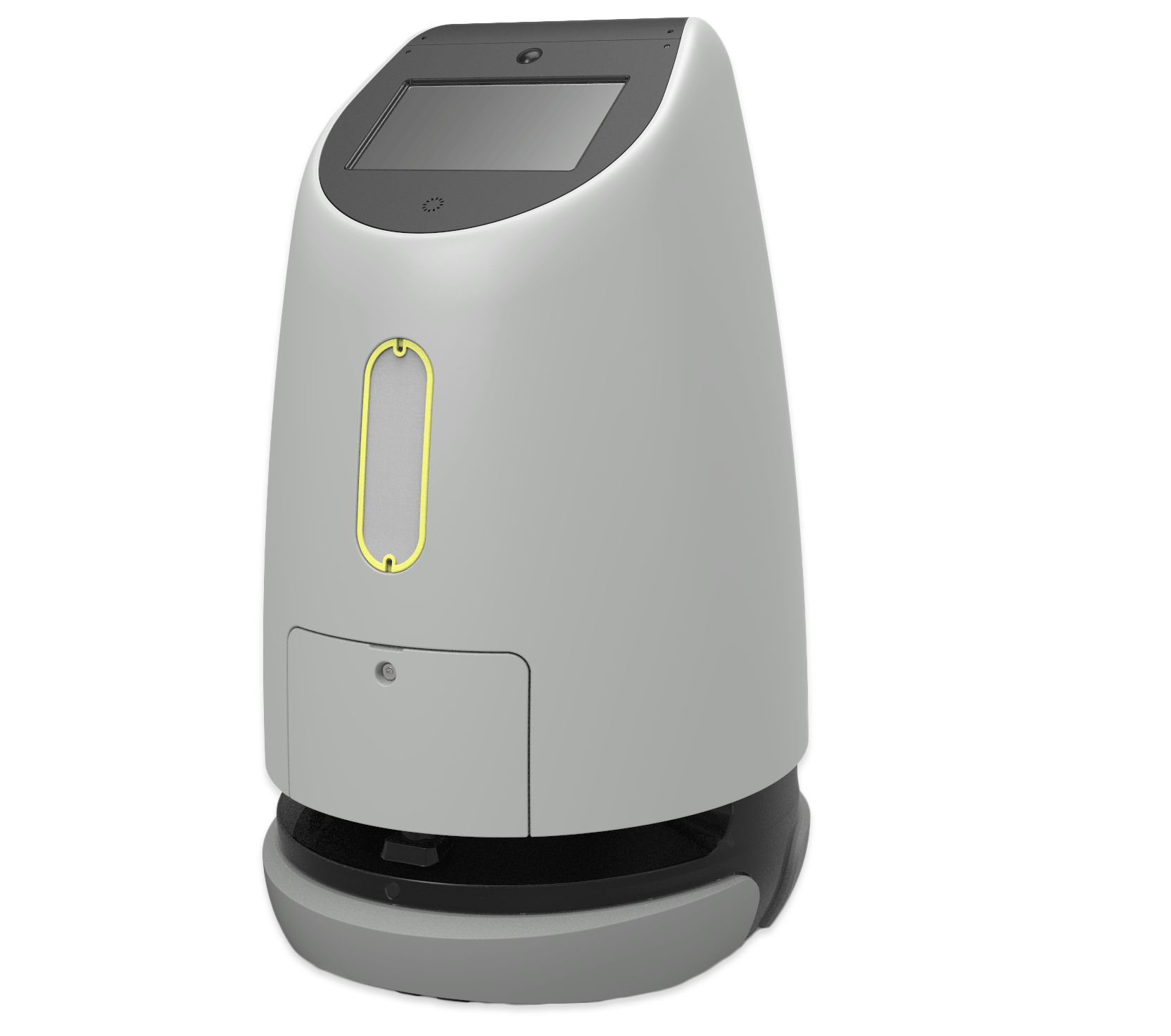
新型案内ロボットLibra
安全規格ISO13482/JIS8446-1に適合した新型案内ロボット
| 身長 | 1050mm |
|---|---|
| 重量 | 40kg |
| サイズ | 幅598×奥行700mm |
| 搭載可能センサ | 頭部:3DLiDAR、タッチディスプレイ 下部:超音波センサ×5 レーザー距離センサ×2 バンパーセンサ×2 |
| 走行性能 | 段差乗越性能:6㎜ 登板角度:5度 点字ブロック走行可 最高速度:5km/h |
| 開発環境 | Linux(ROS) Windows,Linux(OpenRTM-aist) |
| 身長 | 1050mm |
|---|---|
| 重量 | 40kg |
| サイズ | 幅598×奥行700mm |
| 搭載可能センサ | 頭部:3DLiDAR、タッチディスプレイ 下部:超音波センサ×5 レーザー距離センサ×2 バンパーセンサ×2 |
| 走行性能 | 段差乗越性能:6㎜ 登板角度:5度 点字ブロック走行可 最高速度:5km/h |
| 開発環境 | Linux(ROS) Windows,Linux(OpenRTM-aist) |
都産技研では、サービス業の人手不足に技術面で対応するため、施設内で安全に稼働できる自律移動案内ロボットの研究開発を行ってきました。Libraは、来訪者と対話し、施設内の情報を提供したり、目的地まで先導することができます。
このロボットは、一般社団法人電気安全環境研究所(JET)によってISO13482/JIS B8446-1の適合性評価を実施し、リスクアセスメントの精査からロボットの実機試験まで行い、2020年2月27日付でJETより適合判定の評価証明書を取得しました。
本技術の利用をご希望の企業様に対し、ライセンス契約を結んだ上で開発・製造文書など全ての技術情報をご提供します。また、講習会を通じて、Libraをベースにしたサービスロボットの製品化を支援します。
ロボットの製品開発では、製造業者によるリスクアセスメントが必須です。製品に必要な試験の項目や判定基準は、リスクアセスメントの結果によって決まります。リスクアセスメントでは、ロボットの危険源を網羅的に探し、危害シナリオを想定します。次に、危害シナリオのリスクに対し、社会的に広く受け入れられるリスクに低減するまで、下図のように保護方策を講じていきます。
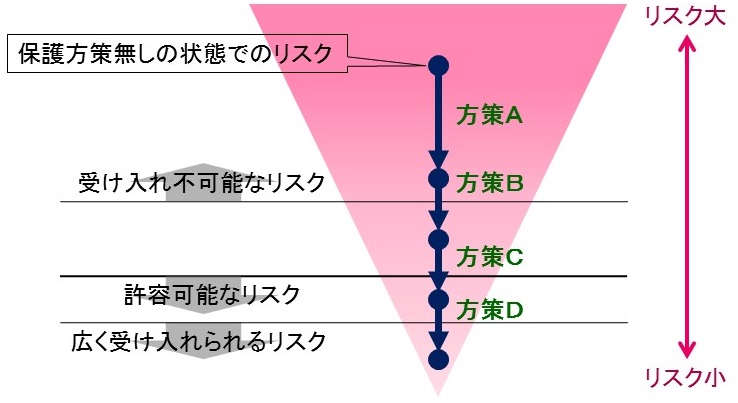
個々の保護方策は、ロボットの実機試験やドキュメント類の精査によって検証されます。同じ自律移動ロボットであっても、使用者や使用場所の制約、ロボットへの搭載機能によってリスクアセスメントの結果が異なるため、ロボット毎に試験項目や試験条件が変わります。都産技研では、Libraや共同研究による様々なロボットの開発経験を基に、お客様のロボット製品開発をリスクアセスメントの段階から支援します。
| サイズ | 400×400×200mm |
|---|---|
| 重量 | 7kg(バッテリを含まない) |
| 電源 | バッテリ 24V |
| 性能 | 段差:10mm 傾斜:10度 最高速度:6㎞/h |
| 特徴 | 点字ブロック走行可 段差の継ぎ目での旋回 |
| 開発環境 | Linux(ROS) Windows,Linux(OpenRTM-aist) |
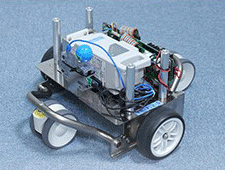
都産技研では、移動ロボット用のプラットフォームを開発してきました。このロボットを使用することによって、機構設計が簡略化できます。
T型ロボットベースの高機能化 システムクラフト株式会社
ドライ掃除ロボット 株式会社キャロットシステムズ
商業施設案内ロボット 08ワークス株式会社
美術館案内ロボット 株式会社プラネックス
ホテル案内ロボット 株式会社日本ビジネスソフト
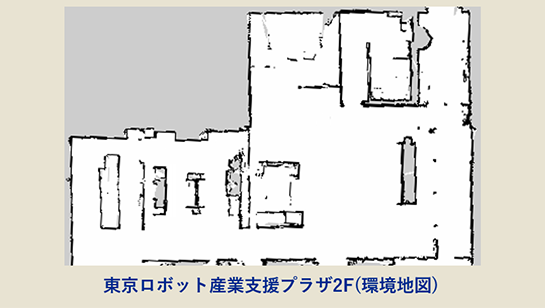
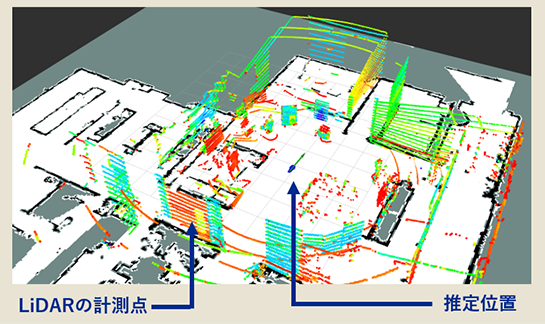
ロボットに搭載しているLiDARで周囲の壁の位置を計測し、SLAMによる環境地図構築や環境地図上でのロボットの自己位置(現在地)を推定します。
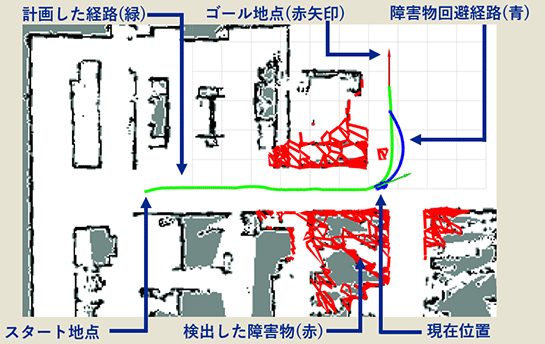
地図上の目的地を与えることで、現在地からどの経路を進めば到着するのか、自動で考えます。
 経路追従制御
経路追従制御
確定した経路に沿うように、ロボットを自律的に走行させることができます。
障害物検知
走行中に障害物が存在することを素早く検知することで安全性を向上できます。
障害物検知にはLiDARと超音波センサを併用しており、黒色の壁、ガラス、鏡のある空間でも検知できます。
障害物回避
走行経路上に障害物が存在した場合、障害物を避けて安全に走行できる経路を考えます。回避経路が見つからない場合には、迂回できる経路を考えます。
障害物停止
経路計画とは別に計算することで、障害物に対して反射的に停止し、衝突を防ぐことができます。
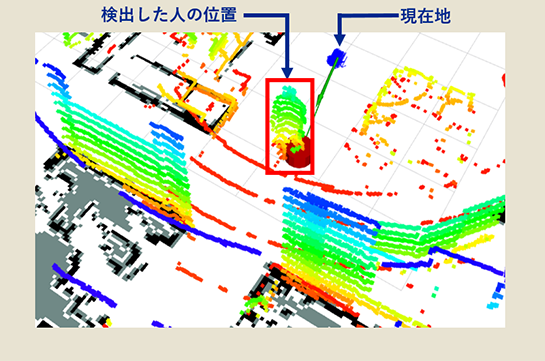
ロボットに搭載されたLiDARで人の足を検出・追跡することで、人の後をついてくる追従や、一定距離を保ちながら先導案内などの人に合わせた動作をすることができます
 自動で追従
自動で追従
案内対象者がカメラの死角に入っても、レーザレンジファインダによる足追い機能により、可能な限り の追跡を続けます。※特開2017-219389
自動で先導
自律走行と案内対象者の位置追跡を組み合わせて、ロボットが案内対象者と一定距離を保ちながら先導させることができます。

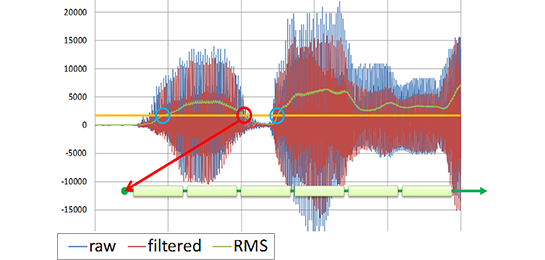
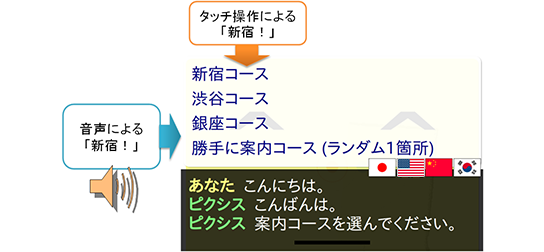
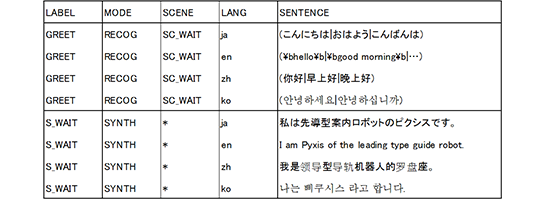
国立研究開発法人情報通信研究機構で開発された
音声認識、音声合成、機械翻訳の各種会話処理技術を、ネットワーク経由で利用できます。
商用利用には、プロアクシアコンサルティング株式会社が開発した会話・翻訳システムが使用できます。音声翻訳サービスには、通信量を1/10に削減する音声圧縮機能や地域に特化する固有名詞登録機能が備わるとともに、オンプレミス版やクラウド版が選択でき、様々なユーザ環境でご利用頂けます。


![]()
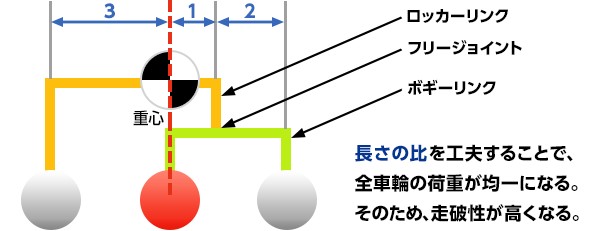
T型ロボットベースの大型版の「Taurus」は、防塵防水機能を備え、重量を300㎏まで積載することが可能です。また、6輪で特殊なサスペンションを採用することによって、凸凹道や50㎜の段差、10度の傾斜を安定して走行可能であり、その場旋回が可能です。複数のセンサを搭載可能で、自動での走行や人追従等の開発が可能となっております。
| 防水防塵 | IP43対応 |
|---|---|
| サイズ | 高さ1,000mm×幅700mm×奥行1,200mm/重量:150kg/積載重量:300kg/スペース:0.65m² |
| 走行性能 | 段差乗越性能:50mm/登板角度:10度/最高速度:2km/h |
| 車輪構成 | 6輪方式:前輪×2(受動輪)、中輪×2(駆動輪)、後輪×2(受動輪) |
| 開発環境 | Linux(ROS) Windows,Linux(OpenRTM-aist) |
| 搭載可能なセンサ | 3DLiDAR×1/レーザー距離センサ×2/モーションセンサ×1/バンパーセンサ×2/超音波センサ×6/ロードセル×4/GPS×1/LED灯×1 |

鉄道事業者向け警備ロボット アースアイズ株式会社
T型ロボットベースの全方向移動4WD版の移動台車「Circinus」は、小型で全方向への移動、その場回転機能を備え、軽量貨物(~10Kg)を積載可能です。『Twinlink機構』(特許申請中)を採用し、メカナムホイールでの最大時速6km/hまでの安定した走行に加え、25㎜の段差、7度の傾斜路の踏破が可能です。走行効率の向上のため、30Aでの高速無線給電システムの搭載が可能です。走行基盤にはROSのナビゲーションシステムを搭載しており、その運用管理はHTMLとJavaScriptによるカスタマイズが可能で、導入先のプログラマによる調整も容易です。
| サイズ | 450×430×1250(荷台上部:400)mm |
|---|---|
| 重量 | 自重40㎏、積載重量5~10Kg |
| 性能 | 段差:25㎜ 傾斜:7度(坂道長Max 5m) 最高速度:6㎞/h |
| 特長 | メカナム4WD機構による全方向移動、 無線(~30A)、有線での動作中充電可 その場旋回 点字ブロック走行可 接近検知(赤外線レーザ、超音波) 全方向バンパーセンサによる接触検知 |
| 運用環境 | 走行基盤:Linux(ROS)(SLAM,追従,リモコン) 運用管理:HTML&JavaScript |
屋外用大型ロボットベース「Taurus」をリサイズした屋内用搬送ロボット「MiniTaurus」。スマホでの操作による人追従機能や巡回移動を使用することで、100㎏までの荷物を運ぶことができます。開発中の搬送システムを使用することで、タブレットやスマホからの呼び出し機能やロボットの状態(位置情報、バッテリの電池残量、カメラ映像、稼働時間等)を端末から管理することができます。
| 主な機能 | スマホ操作による人追従、巡回移動、無線充電機能 |
|---|---|
| サイズ | 高さ1,200mm×幅605mm×奥行900mm/重量:120kg/積載重量:100kg/積載スペース:600×580mm |
| 走行性能 | 段差乗越性能:15mm/登板角度:5度/最高速度:2km/h |
| 車輪構成 | 6輪方式:前輪×2(受動輪)、中輪×2(駆動輪)、後輪×2(受動輪) |
| 開発環境 | Linux(ROS) Windows,Linux(OpenRTM-aist) |
| 搭載センサ | 3DLiDAR×1/レーザー距離センサ×2/モーションセンサ×2/バンパーセンサ×2/超音波センサ×2/ロードセル×4/LED灯×1 |
| システム連携機能 | 呼び出し機能 ロボット情報管理機能 |

展示会場などの広いエリアを清掃するロボット(ハードウェア)を開発しました。
業務用他機種と比較して小型、軽量、安価となるよう、市販の汎用部品を多用しているので短期間で開発することができ、消毒清掃ロボット、軽量物運搬ロボットなどにも展開可能です。
事業化の際には量産効果でより低価格化が期待できます。
自律移動ソフトはRtino(株式会社セック)を導入することで、ソフト開発の負担を減らしています。※ ROSの公開パッケージを使っての自社開発ソフトでも自律移動も可能です。
本技術の利用をご希望の企業様に対し、ライセンス契約を結んだ上で開発・製造文書など全ての技術情報をご提供します。
| サイズ | 幅 430x高さ 555x奥行 720 mm |
|---|---|
| 重量 | 35kg |
| 搭載可能センサ | 3DLiDAR 超音波センサx3 レーザー距離センサ バンパーセンサ |
| 走行性能 | 段差乗越性能:6mm 登坂能力:5度 点字ブロック走行可 最高速度:6km/h |
| 自律移動ソフト | RTino(株式会社セック) |
| 製造コスト | ボディパーツ以外の構成パーツ 84万円 ボディパーツ(FDM材料費) 77万円 |

多言語での音声認識、会話、説明、翻訳が可能で、搭載センサにより、追従及び自律移動(先導)しながらお客様への案内が可能です。移動時は、障害物を回避することができます。複数のディスプレイと連携、必要な情報を表示しながら案内が可能です。WEBアプリとの連携で様々な機能が追加可能(例:経路検索)。マスコット部は、他のキャラクターへ交換が可能です。
| 身長 | 1270mm |
|---|---|
| 重量 | 25kg |
| サイズ | 幅530mm×奥行640mm |
| 搭載可能センサ | 頭部:LED 胴体部:赤外線カメラ |
| 開発環境 | Linux(ROS) Windows,Linux(OpenRTM-aist) |

商業施設案内ロボット 08ワークス株式会社
美術館案内ロボット 株式会社プラネックス
ホテル案内ロボット 株式会社日本ビジネスソフト
T型ロボットベースに移動知能・会話知能を搭載して、自律移動型の多言語案内ロボットを開発しました。お客様との距離を適度に保ちつつ、博物館やホテルといった施設の中を先導してご案内します。
| 身長 | 1015mm |
|---|---|
| 重量 | 35kg |
| サイズ | 幅610mm×奥行680mm |
| 搭載可能センサ | 頭部:カメラ×3(1台はチルト機構搭載)、マイク×8、スピーカー×2、超音波センサ×3、タッチディスプレイ×1 胴体部:荷台(鍵付き)、バッテリ扉(鍵付き)、超音波センサ×12 底部:超音波センサ×6、レーザレンジファインダ×2、バンパースイッチ×4 |
| 走行性能 | 段差乗越性能:6㎜/登板角度:5度/点字ブロック走行可/最高速度:6km/h |
| 開発環境 | Linux(ROS) Windows,Linux(OpenRTM-aist) |

商業施設案内ロボット 08ワークス株式会社
美術館案内ロボット 株式会社プラネックス
ホテル案内ロボット 株式会社日本ビジネスソフト